
Grasping the railing of a stopped treadmill in the basement of Fitzpatrick Hall of Engineering, Laura Light broke into an electric smile as she used an experimental foot-and-ankle prosthesis to stand on her tiptoes.
Patrick Wensing, an assistant professor of aerospace and mechanical engineering who specializes in robots and motorized prosthetics, gave a thumbs-up to his two doctoral degree students. David Kelly focused on Light’s balance and safety, while Ryan Posh watched the data his computer received from several electric sensors attached to the muscles of Light’s residual left calf.
“That was amazing, because I have not been able to do that ever — since my foot was amputated as a little child. That was a really cool experience, something I always wanted to do as a kid.”—Laura Light
The sensors read electrical twitch signals from Light’s muscles, allowing her to fully control for the first time the forward roll of a motorized ankle device — and to ultimately stand on her toes.
“I feel like a little kid,” said Light, 28. “That was amazing, because I have not been able to do that ever — since my foot was amputated as a little child. That was a really cool experience, something I always wanted to do as a kid.”

Wensing conducts research on robots, exoskeletons and powered lower-leg prostheses as director of the Robotics, Optimization and Assistive Mobility (ROAM) lab in Notre Dame’s College of Engineering. While current prostheses for thousands of people with lower-limb amputations can be given a motor assist, Wensing’s team is advancing the human-machine interface so that users can control the ankle movement — giving them a crucial “sense of volition” while improving comfort and safety.

The ROAM team tested three different control mechanisms with Light. The first — volitional — is based on myoelectric sensors that allowed Light to control the rollover movement of the ankle. The second — autonomous — automatically boosts ankle roll based on pre-programmed angles in the way that some already available motorized prostheses work. The third controller, the team’s latest experiment, combines the advantages of the first two.
Light walked on the treadmill for two minutes with each system, while Kelly videotaped her gait to evaluate how natural it appeared. Posh gathered data on how well the myoelectric sensors picked up and responded to Light’s muscle signals.
“This has gone better than we imagined,” Wensing said after the experiment. “There are lots of myoelectric solutions out there for prosthetic hands. But there are less for legs because you have to avoid falls to ensure safety.”

Painful Choice
Light was born in Memphis, Tennessee, with a condition called fibular hemimelia, where the smaller bone in a lower leg is too short or missing. Her parents faced the difficult choice of either amputating the lower leg or trying to save it through a series of painful and uncertain surgeries. After speaking with doctors and families who had made both choices, they chose to amputate at 14 months.
“At 18 months old, I was able to get a prosthetic leg,” Light said. “I don’t know any different at all.”
Her family moved near Goshen, Indiana, when she was young, and her parents encouraged her to try anything she wanted to do. She played several sports and liked volleyball the best. In the lab, she said her sunburn came from a recent tournament of beach para volleyball, a sport she hopes to compete in during the 2028 Paralympic Games.


Light works as a dispatcher for Elkhart County. She heard about Wensing’s research from a news story and reached out by email. She said she was glad to volunteer for testing even though it could be years before the now-bulky technology shrinks and reaches the commercial market.
“The foot I’m currently wearing is a good foot, but it does have some limitations as far as the natural rollover, because the ankle’s pretty much fixed,” Light said. “This foot, I think, will be huge because it’ll adjust to the terrain that I’m on. I can do things like hiking and do it more naturally, and be a little bit less nervous about doing it.”
Other advantages Light discovered during the tests included standing on tiptoes, walking backward and being able to rotate the foot all the way down to the floor while sitting.
“To me, that’s huge, because I’ve never been able to sit with my foot sitting down,” she said. “It’s always taking up so much room, which is frustrating when you’re in a tight space. Also, just having a natural gait would save my hip and ultimately my lower back.”
Robotics Fan
Wensing grew up on the east side of Cleveland and got involved in robotics in high school. “I got to participate in my first robot competition in ninth grade, which was phenomenal,” he said. “That was where the interest sparked and really grew from there.”

“We want these devices that people are going to wear to get better over time, and people to get better at using them, and we’re trying to tease out how we can accelerate that process.” —Patrick Wensing
He studied electrical and computer engineering at Ohio State University and continued there for his doctoral degree. He worked briefly on humanoid robots in France, testing his dissertation theories, and landed at the Massachusetts Institute of Technology for a postdoctoral position making robots more autonomous and maneuverable.
Wensing came to Notre Dame in 2017 because he said the University and fellow faculty supported his research vision. He also had collaborated in the past with Jim Schmiedeler, an expert in human biomechanics who also came to South Bend from OSU and is a collaborator on the current study.
“His work really fits nicely with the core robotics work that is my background, so we have a great deal of synergy,” Wensing said. “I see other opportunities in teaming with folks in psychology or computational neuroscience. We want these devices that people are going to wear to get better over time, and people to get better at using them, and we’re trying to tease out how we can accelerate that process.”


Besides the lower-limb prosthetic device, Wensing’s ROAM lab also works on four-legged robots and lower-body exoskeleton systems. His exoskeleton work aims to use more conventional sensors that would allow people with spinal cord or stroke injuries to improve control of their walking gait.
Dr. Chandan Sen, a specialist in wound healing at the Indiana University School of Medicine, said he has collaborated on Department of Defense projects with Schmiedeler and Wensing.
“I am very excited about the potential,” said Sen. “It could be transformative in ensuring the long-term health of the residual limb of amputees. This is critical for the overall well-being of such patients.”

Lab Test
The ROAM team met with Light in 2021 but had to get safety clearance for their work with human test subjects. In May, Light visited the basement lab as the first amputee to test the motorized prostheses that Wensing and Posh had previously tried on themselves.
Adam Waugh, a certified prosthetist with Transcend Orthotics and Prosthetics, joined the Notre Dame researchers to offer advice and assistance. His most important responsibility was to take apart and rebuild Light’s current prosthesis so she could try the experimental one without compromising her safety.
“We were excited for the opportunity to offer our support and assist with this research,” Waugh said. “Every patient who has benefited from any number of complex devices has individuals like Ryan [Posh] to thank for their dedication to the advancement of the technology used within the prosthetic industry.”
“While the research is still in its early stages, I believe it will improve the lives of many people in the future.”—Adam Waugh
Waugh works with amputees regularly and sees how new and improved devices enrich their lives. He said allowing patients to move their own foot more actively would open the door to new activities and help with fatigue. Light agreed, noting that she had torn up the knee of her other leg by overcompensating through the years.
“This will likely increase blood flow to the leg, decrease volume fluctuations with use, and improve sound-side limb health overall,” Waugh said. “While the research is still in its early stages, I believe it will improve the lives of many people in the future.”
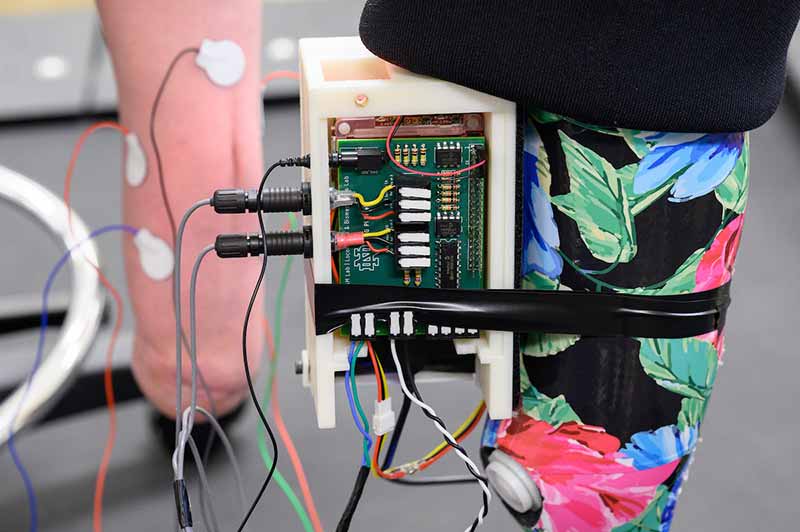
Posh first put Light’s shoe on the experimental prosthesis and taped a microcontroller to the socket of the prosthesis. He attached the electrode sensors that would register her muscle contractions in different spots on her residual calf.
The first step was calibration, testing whether the computer could pick up signals of extension and flexion in her muscles. The signals didn’t show up on a video screen as hoped, but the computer did register them at 250 readings per second.

As the device took control based on her muscles, it made a quick pop into position. Light gasped and said it felt “like having a frog in my foot.” She soon figured out how to position her leg to minimize the foot jump.
“That’s so weird,” she exclaimed. “I don’t know how to get it (the foot) where I want it to go.”
Posh and Wensing assured Light that it takes time to learn how to send the muscle signals to control movement, something Light had never had reason to try.
“I’m not used to firing that muscle; I’ll have to build it up,” she said. “I bet people who had a more recent amputation would know how to do it easier.”
Light hooked into a safety harness before standing and performing the three walking tests. Adjustments were made so that the motorized push off the heel would occur at the right moment in her walking gait. The motor made a whirring noise almost like a chipmunk squeak.
Light practiced rolling the foot forward and back, standing on tiptoes and sitting with it flat on the floor. “I like that this ankle rolls,” she said. “I don’t want to go back to my old foot.”

Advancing Market
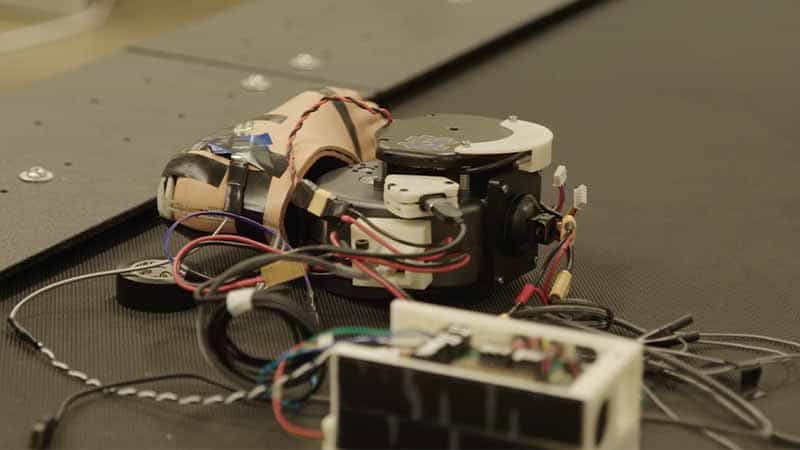
Light knew that the exposed wires and bulk of the experimental foot made it not ready for full-time use. That configuration allows the researchers to easily customize it. Wensing said he expected the size to decrease with battery and computer miniaturization technology, in the same way that a smartphone now has more computing power than original room-size mainframes.
One potential collaboration has been discussed with an alumnus who could speed up bringing this technology to the market. Jim Colvin, an ’83 graduate and the director of research and technology at the Ohio prosthetics manufacturer WillowWood, has been working in the industry for three decades.
Colvin said the company was started in 1907 by a brakeman who lost both lower legs in a train accident and began carving prostheses out of willow wood. “I’ve seen great improvements since I started, when some legs we made were still wooden,” Colvin said. “But it still falls short of what a natural limb can do, so we have a lot of work to do.”
“As an engineer, it’s so rewarding to apply technology to help people live better lives.” —Jim Colvin
Colvin said WillowWood also makes liner products to protect the amputated limb where it connects to the prosthesis. “The interface can be damaging to the limb tissue because it’s a part that was not designed for that extreme load,” he said.
One new product the company has developed embeds myoelectric sensors like the ones Wensing uses right into the liner. Colvin said he has spoken with Wensing about proposals to combine the technology with ROAM research to improve products coming into the market.
“Advanced devices are more intuitive, so the user feels like it’s part of them and works seamlessly,” Colvin said. “As an engineer, it’s so rewarding to apply technology to help people live better lives. The results are tangible.”
Related
View More Notre Dame Stories angle right

Fighting for the Dignity of Independence

Fighting to Help Others Walk Again
