HomePage of Charles Wampler
 |
 |
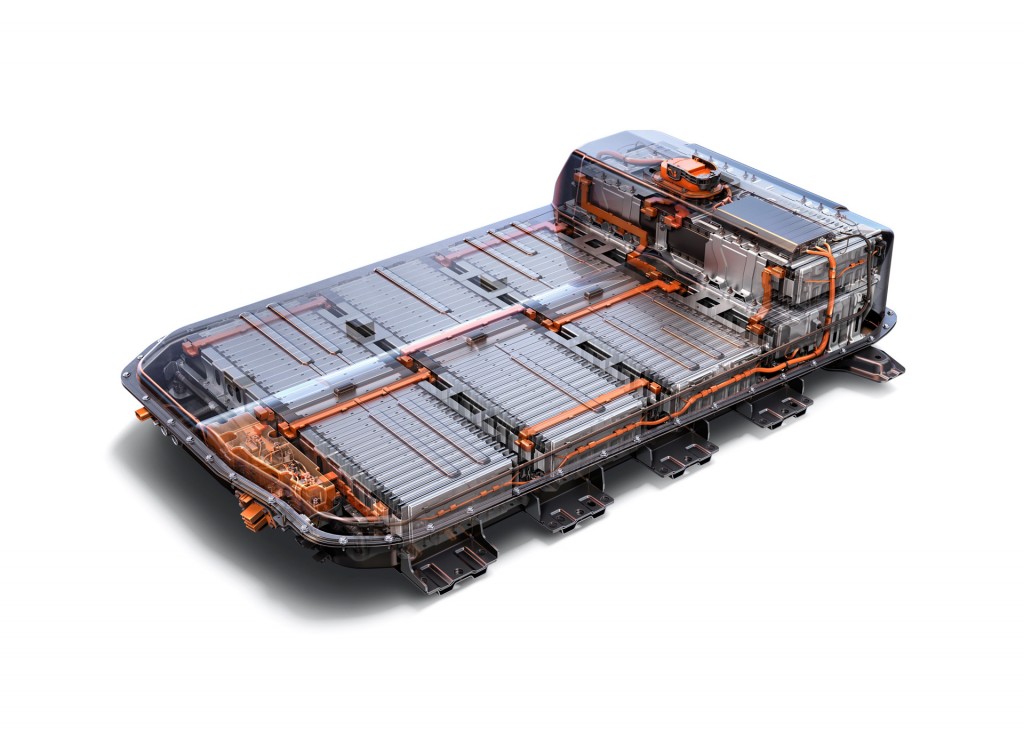 |
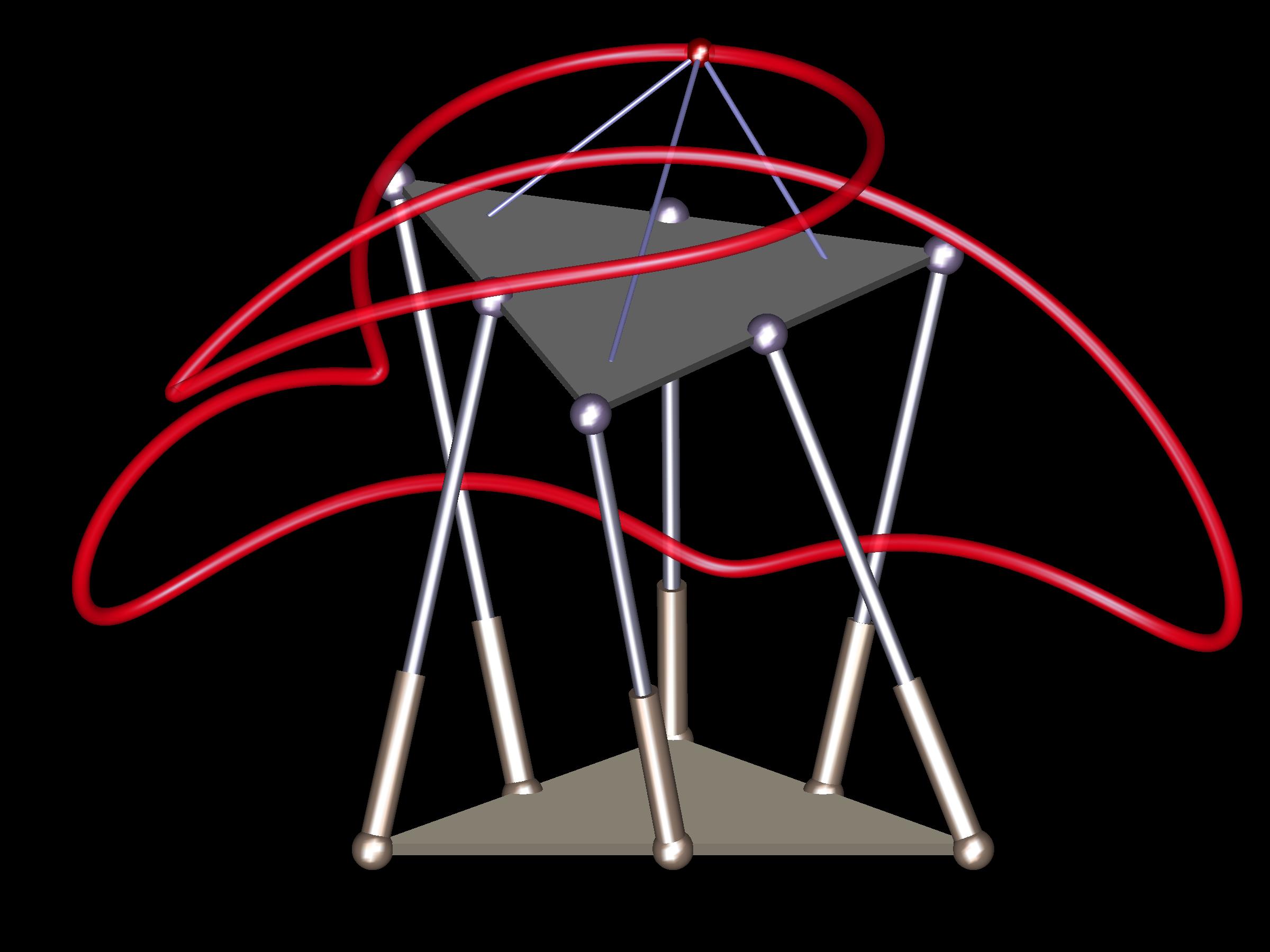
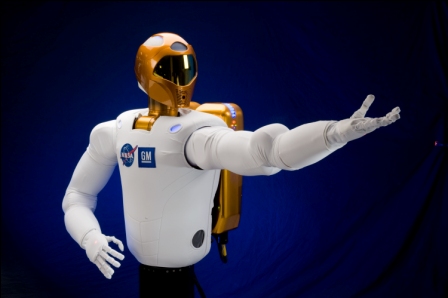
| Kinematics | Robonaut 2 | 2017 Chevy Bolt battery |
Research Statement:
Concerning kinematics, robotics, and numerical algebraic geometry...
Work at General Motors: Including EV batteries, Robonaut 2...
Polynomial Continuation and Kinematics
The "Wampler Conference" Polynomials, Kinematics, and Robotics was held June 5-7, 2017.
For more about the connection between kinematics and polynomials, along with an introduction to
polynomial continuation and numerical algebraic geometry, view the
slide show (45 min. with audio) recorded at my talk to the SIAM Annual Meeting, Pittsburgh, July 13, 2010.
Or you can view a PDF of just the slides.
Publications:
List of articles and a download page of preprints. Also includes links to my two books.
Software:
Description and links to Bertini and HomLab.
Links to journals and professional organizations.
Contact Info
cwample1 (at) nd (dot) edu
Maintained by Charles Wampler/revised
Nov. 2, 2023
